
研究介绍
主要方向:
1.农机轨迹大数据分析与挖掘
通过对于农机轨迹大数据的分析与挖掘,可以直观地掌握全国及各地小麦收割机的空间分布、移动速度,能够对麦收稻收等作业的整体过程有完整、客观、精确的把握,可以提供及时有效的交通疏导和应急保障等服务。作业结束后,经深度挖掘,还可以量化评价我国农机分布均衡性、农机利用率和农机作业效益,揭示我国农机社会化服务的现状、特征和问题,从政府层面宏观调控,整合行业资源,合理调度农机,为我国农机购置补贴和农机作业补贴等政策的优化提供决策参考。
 |  |
| 2023年全国春小麦收割热点图 | 农田内部轨迹动态展示 |
2.农机无人驾驶
为了实现无人农场全场景全过程的无人化作业,针对无人农机机型众多、任务复杂、适配困难、作业精度不高、决策缺乏智能等问题,我们着眼于突破“机库-机耕道-农田”全场景下农机作业的关键技术。通过开发无人农机全场景智能可信导航控制装备,实现无人农机从机库到机耕道再到农田的全程无人行驶和精准作业,包括耕种和收获等环节。同时,农场三维路径规划技术将确保农机在复杂农田环境中高效、安全地行驶。此外,农机具精准控制技术有助于确保农机在作业过程中能够准确地执行指令,提高作业的精度和效率。最后,全流程智能决策技术的应用将使无人农机能够智能地进行决策,从而进一步提升作业效果。
全场景下无人农机作业示例
以往研究:
1.全球剖分理论及在无人机领域的应用
无人机空间位置标识是无人机管控的基础。无人机标识不仅要为无人机实时监控提供有力手段,更应该在保证安全的前提下,通过有效管控实现空域利用的最大化。空间位置信息是无人机标识的核心组成部分,为动态标识信息,数据量巨大,其编码、传输、交换和处理比较复杂,同时还涉及位置隐私保护,需要采用适当的空间位置框架体系标准,高效地表达。
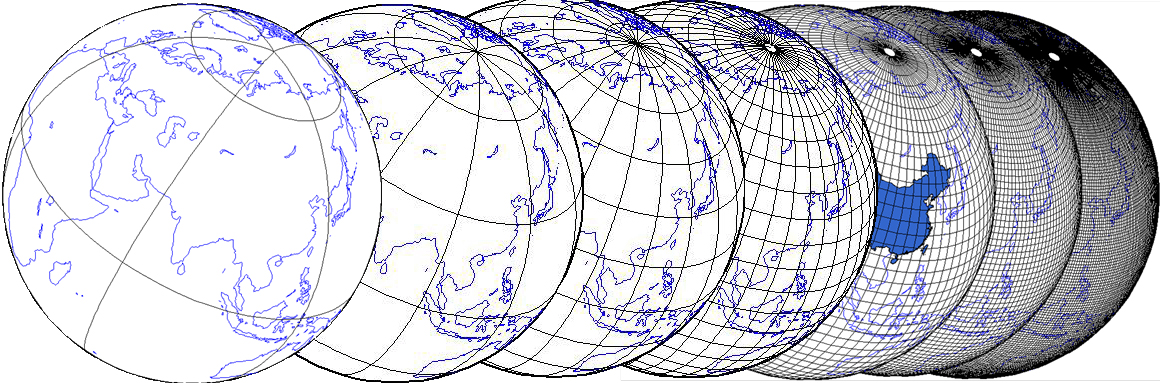
二维全球剖分示例
 |  |
| 三维全球剖分示例 | 网格化无人机管控示例 |
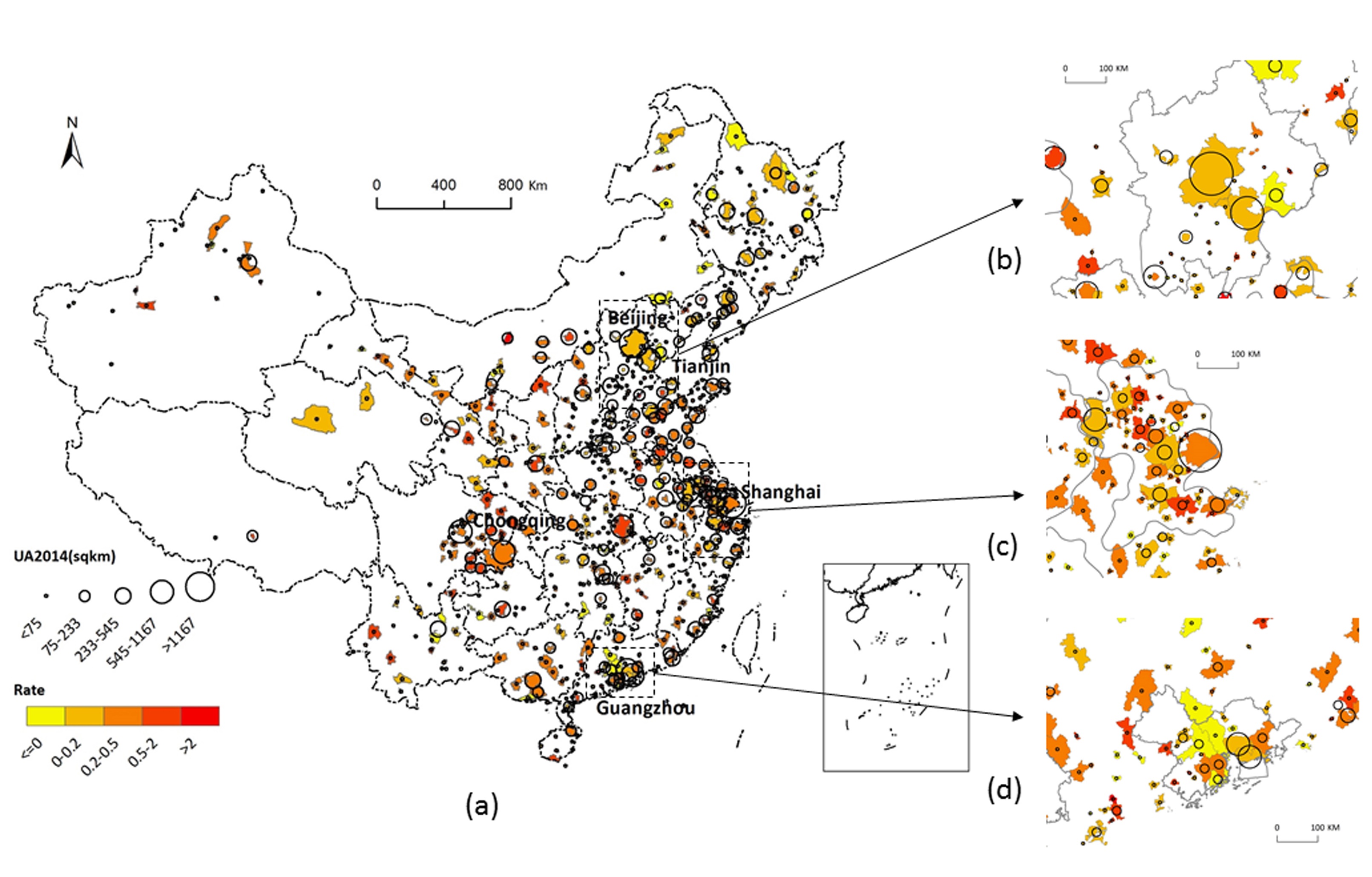
2.基于多源数据的城市扩张/收缩分析
面向快速准确地监测我国的城市扩张与收缩的需求,提出一种利用多源开放数据,通过构造和分析不同年份的“自然城市”,进行中国城市扩张与收缩的多维度监测的方法。
 | 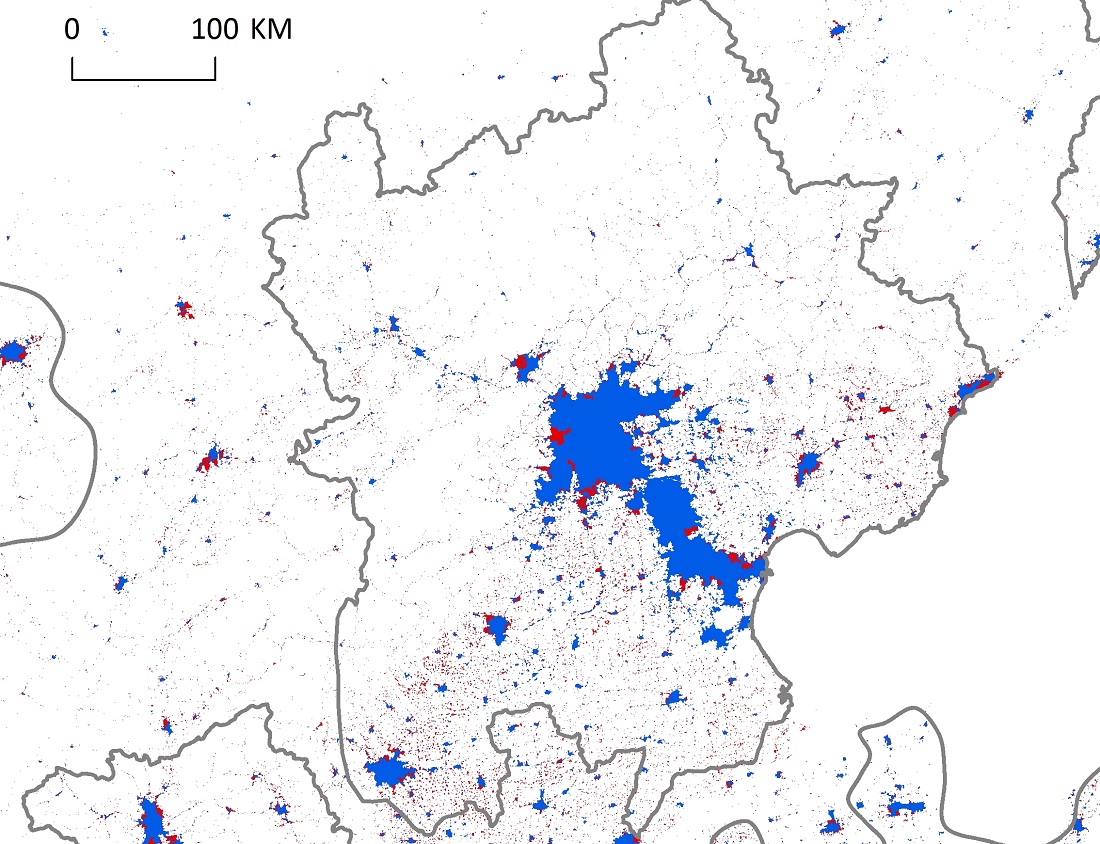 | 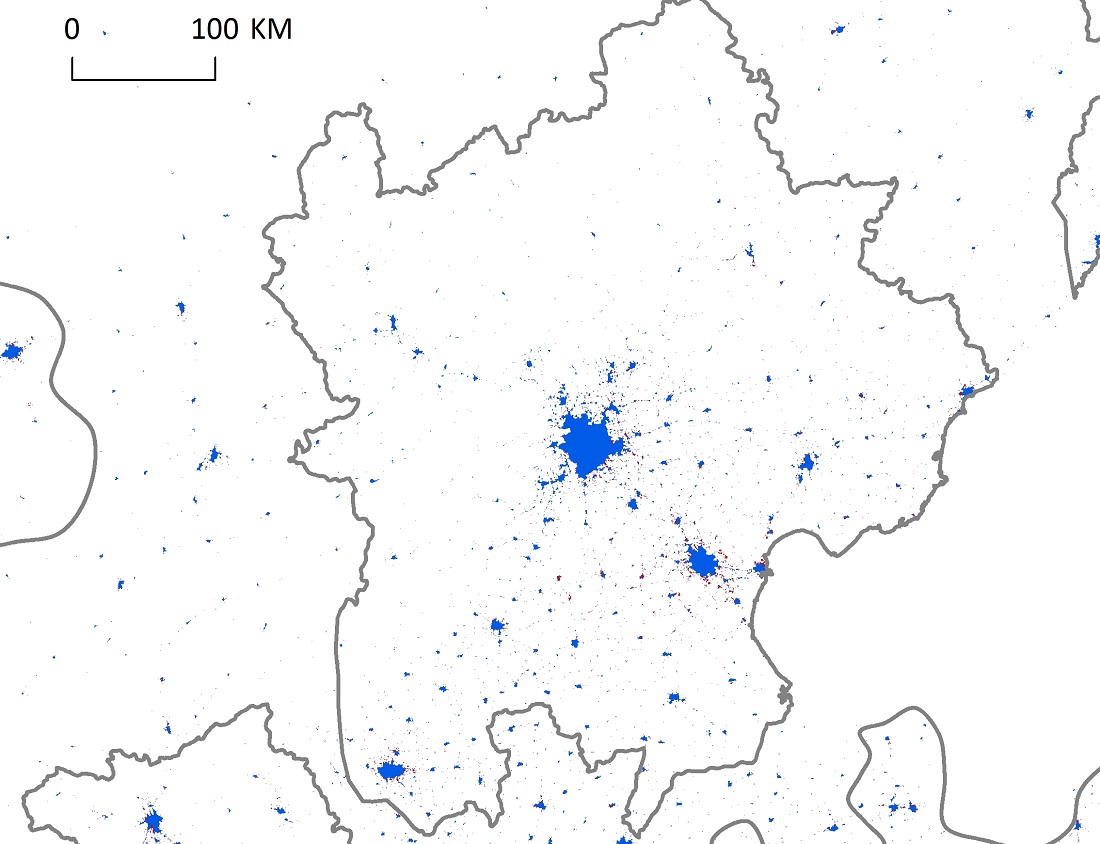 |
| 京津冀地区的物理维度变化 | 京津冀地区的形态维度变化 | |
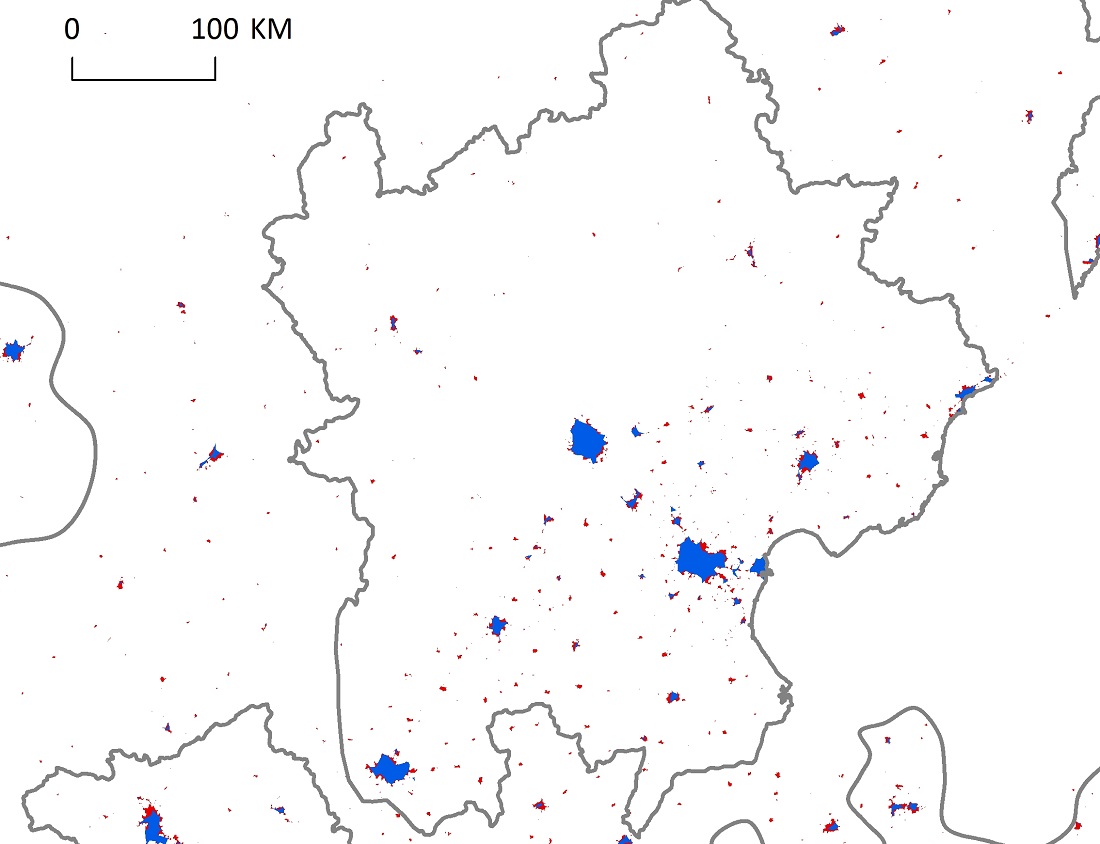 | 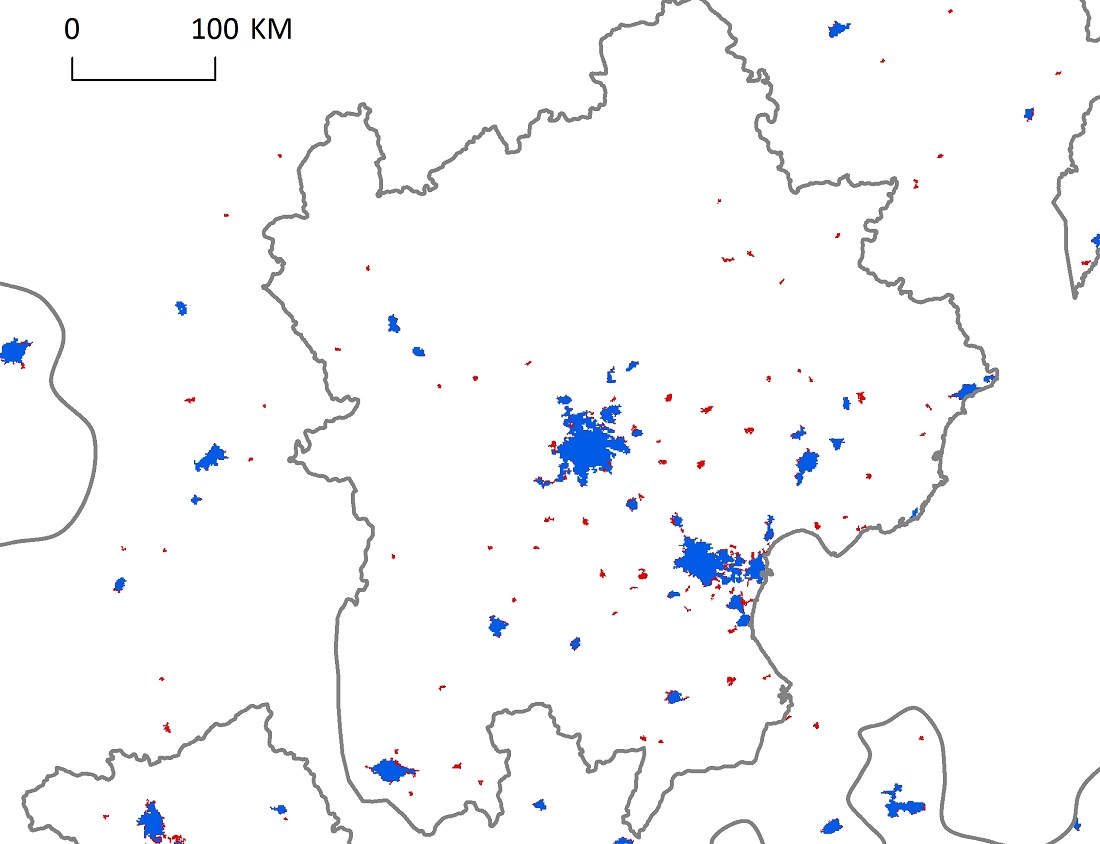 | |
| 全国自然城市分布(2009-2014) | 京津冀地区的功能维度变化 | 京津冀地区的社会维度变化 |